خطوات نحو الحرية
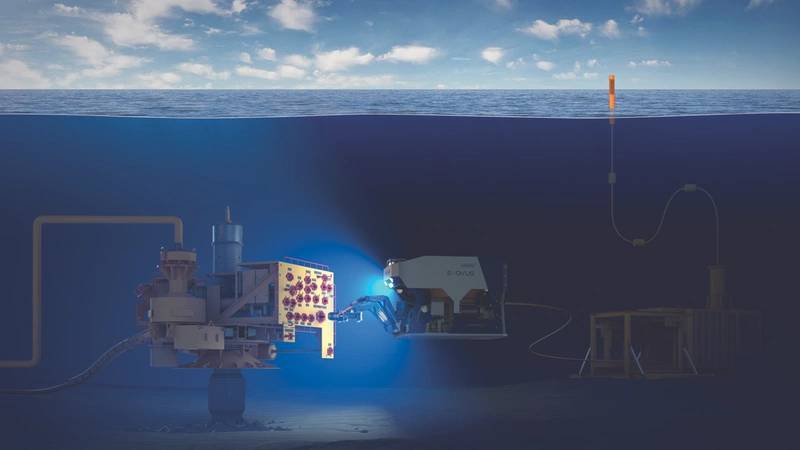
-106520 "E-ROV (تصوير: علم المحيطات)")
يناقش ستيفان ليندسو ، مدير التكنولوجيا الناشئة في أوروبا ، في شركة Oceaneering ، أنظمة المغمرين المقيمين ، والسبب في أن الاستيعاب اليوم يبدو أكثر ترجيحًا في الألفية الجديدة.
ما كان في عداد المفقودين في أوائل 2000s؟
المكون الرئيسي المفقود لهذا لجعل أي معنى التشغيلي هو الاتصالات. بدون اتصالات موثوق بها لدعم الشاطئ ، لن يكون هناك سيناريوهات كافية حيث يمكن تخفيض التكلفة لجعل الاستثمار في هذه التقنية قابلاً للتطبيق.
وقد أثبتت عملية استكشاف المحيطات تجربة القيادة عن بُعد منذ عام 2004 من خلال وصلة ساتلية في بحر الشمال. لقد نجحت في ذلك الوقت ، ولكن المتقدمة في شبكات الاتصالات وزيادة التغطية تجعل الأنظمة التي يتم تشغيلها عن بُعد والحكم الذاتي خيارًا حقيقيًا اليوم.
 (الصورة: علم المحيطات)
(الصورة: علم المحيطات)
ما الذي يجعل هذه الأنظمة ممكنة الآن؟
مرة أخرى ، يعد الاتصال السطحي عقبة كبيرة تم التغلب عليها إلى حد كبير. هذا ينطبق على 4G في بحر الشمال وأيضًا في خليج المكسيك. أصبحت الاتصالات عبر الأقمار الصناعية أسرع وأرخص وأكثر استقرارًا والعديد من المنشآت البحرية لديها الألياف المباشرة لدعم التوصيلية الآن. الصناعة لديها عدد من الحالات الطارئة عندما يتعلق الأمر بالتواصل.
من وجهة نظر الحكم الذاتي ، يمكننا القول أن أجهزة استشعار البطارية والموقف هي التحسينات الرئيسية التي تجعل هذه التطورات التكنولوجية ممكنة تجاريًا.
أتذكر أنني كنت أدرس في جامعة ساوثهامبتون ورأيت مركبات AUVs [ذاتية الحركة تحت الماء] محملة بآلاف بطاريات البطاريات غير القابلة لإعادة الشحن من أجل القيام بمهام تحت الجليد. على الرغم من أن هذا قد يكون حلاً قابلاً للتطبيق تقنيًا ، إلا أنه غير قابل للتطبيق تجاريًا. تطورت تكنولوجيا البطارية وتحسنت. يمكننا الآن تقديم حلول أكثر فعالية من حيث التكلفة وصديقة للبيئة. الآن لدينا بطاريات فائقة الكثافة عالية الطاقة يمكنها تحمل ضغوط المحيط حتى عمق 6000 متر من المياه. يتيح لنا ذلك تصميم سيارات هيدروديناميكية أصغر يتراوح مداها بمئات الكيلومترات.
من وجهة نظر تحديد المواقع ، نحن نستخدم أجهزة تسجيل سرعة دوبلر وأنظمة الملاحة بالقصور الذاتي (DVL / INS) التي تحسب الحركة النسبية وتستقطب أفضل موضع حالي مقدّر بالنسبة إلى موضع بدء معروف. لقد كانت هذه الأنظمة موجودة منذ سنوات عديدة ، ولكن التكنولوجيا قد تحركت بسرعة ودقة محسنة لهذه الأنظمة تمكننا من زيادة نطاق مهامنا تحت البحر مع الحفاظ على تحديد المواقع بدقة.
ما هي أفكارك حول محطات الإرساء تحت سطح البحر المفتوحة؟
العمل الحالي في محطات الإرساء في بدايته. يتمثل أحد الجوانب الإيجابية في تصميم محطة الإرساء الحالية في أنه بسيط نسبيًا وفعال من حيث التكلفة مع توفير وصول سهل لأي مركبة شكل عامل لرسو السفن والتواصل. هناك عدد من القيود التي نتطلع إلى تخطيها لأن أي حل "يناسب الجميع" يأتي مع حلول وسط. لا تتوقع شركة Oceaneering استخدام كل من محطة الإرساء التصميمية الحالية ومحطات الإرساء المصممة لتوفير حماية أفضل للمركبة وقدرات أعلى في تخزين الأدوات التي يمكن أن تضيف قيمة أكبر لمفهوم الطائرات بدون طيار تحت الماء.
ما هو الجديد مع الحرية؟
وضع Oceaneering ما نسميه مختبرنا الحي في مضيق في النرويج. يمكّنك الموقع من إجراء اختبارات يومية لبرامجنا ، سواء في المياه الضحلة للغاية ، أو في أعماق المياه التي تصل إلى 300 متر. نحن نستخدم المنشأة وأداة الاختبار لتقييم حزم البرامج أثناء إنشائها بواسطة فريق تطوير البرمجيات الداخلي لدينا. من أجل ضمان الحفاظ على وتيرة التطوير ، فإننا نعمل في منطقتين زمنيتين. يوجد فريق البرمجيات في الولايات المتحدة حيث يمكنهم تطوير برنامج جديد وإعداده لفريق Living Lab للتحميل إلى السيارة أولاً في الصباح. بمجرد أن يبدأ فريق برمجياتنا في الولايات المتحدة يومه ، يكون لديهم فعليًا اختبارًا ليوم كامل متاحًا للتنقيب عن التعليمات البرمجية وتحسينها. مكنتنا هذه العملية من تحقيق خطوات كبيرة.
 الحرية (الصورة: المحيط)
الحرية (الصورة: المحيط)
ما هي الخطوات التالية؟
بعد SPE Offshore Europe ، سيتم شحن مركبة Freedom الخاصة بنا إلى النرويج ، حيث ستخضع للتجربة ، أولاً في خزان الاختبار الخاص بنا ثم في مختبرنا الحي. نقوم حاليًا بإنشاء نموذج محاكاة لتصميم محطة الإرساء المفتوحة المصدر الحالية. سيتم تثبيته في مختبرنا المعيشي لمزيد من التطوير لرسو السفن والاتصالات والشحن من خلال تقنية الاستقرائي.
أخيرًا ، ما الذي يفعله مفهوم E-ROV (يطلق عليه أيضًا "الحرية")؟
تم نشر E-ROV عدة مرات الآن وقد أثبتت بالفعل قابليتها للاستخدام كحل IMR لنطاقات العمل الخفيفة. كما هو الحال مع جميع التقنيات الجديدة ، فقد واجهنا بالطبع تحديات تقنية في المراحل الأولية ، لكن حتى الآن لم نتمكن من حل أي شيء. نتوقع أن تصبح E-ROV الأولى قيمة كبيرة لعملائنا ونتوقع أن يتم تطوير هذا المفهوم ، الذي أطلقنا عليه اسمًا رسميًا Liberty ، بشكل أكبر.
 (الصورة: E-ROV)
(الصورة: E-ROV)
شركة ويلسون تبدأ تصنيع الأجزاء العلوية لوحدة الإنتاج والتخزين العائمة "ساكاريا" في المياه العميقة بتركيا
-170704 "(حقوق الصورة: Wison New Energies)")
شركة إيكو أتلانتيك تُعزز توسعها في جزر فوكلاند البحرية من خلال صفقة مع شركة جيه إتش آي
-للنفط-والغاز)
-170668 "(حقوق الصورة: شركة إيكو (أتلانتيك) للنفط والغاز)")
شركة ADES تفوز بعقد بقيمة 48 مليون دولار في نيجيريا لمنصة الحفر الرئيسية الرابعة
")
تركيا تستهدف طرح أول مناقصة لمشاريع طاقة الرياح البحرية، حيث من المتوقع أن يكون عام 2026 "عام الرياح".
")
تتعاون قطر للطاقة وتوتال إنيرجيز وكونوكو فيليبس في منطقة بحرية سورية
-170532 "(مصدر الصورة: قطر للطاقة)")
قامت شركتا أورستد وبي جي إي بتركيب أولى الأساسات في مزرعة رياح بالتيكا 2 البحرية في بولندا
-170484 "(حقوق الصورة: فان أورد)")
شركة أمبليتيود إنرجي تحصل على ترخيص إنتاج حقل آني للغاز قبالة سواحل أستراليا
-170410 "(حقوق الصورة: Amplitude Energy)")
النرويج تضيف 70 منطقة بحرية في جولة جديدة من تراخيص النفط والغاز
")

-170109 "(حقوق الصورة: شركة أودفيل للتكنولوجيا)")

