تصوير المستقبل
")
ذات مرة ، كان الفحص البصري للبنية التحتية تحت سطح البحر يعني أن الغواصين يأخذون الكاميرات الثابتة إلى قاع البحر ، على أمل ألا يغمر غلاف الكاميرا ، أو أن الفيلم لن يكون مكشوفًا أو مدمرًا أثناء التطوير. حتى باستخدام أول مركبات يتم تشغيلها عن بُعد (ROV) مع موجز فيديو مباشر ، فقد كان من الصعب مشاهدة مشهد طويل بما يكفي لهدف التفتيش ، بسبب محدودية وظيفة التحكم وتحديد المواقع إذا كان هناك أي مستوى من التيار.
من الآمن القول أن الصناعة قطعت شوطًا طويلًا منذ ذلك الحين وتتوسع إمكانات التصوير كل يوم. في الواقع ، بدأت المشكلة الآن في كيفية معالجة "تسونامي" البيانات التي يتم جمعها.
هذه القضايا كانت على رأس جدول الأعمال في ندوة مشتركة عقدت من قبل الجمعية الهيدروغرافية في اسكتلندا (THSiS) ، والرابطة الدولية لمقاولي البحرية (IMCA) وجمعية التكنولوجيا تحت الماء (SUT) في أبردين في أكتوبر.
من ناحية ، منصات الاستشعار تتطور. أصبحت كل من ROVs والمركبات ذاتية الحكم تحت الماء (AUV) أسرع في الاستخدام ؛ وقال بيتر كولينسون ، كبير خبراء البحار والبيئية في شركة بريتيش بتروليوم في شركة النفط الكبرى ، أمام الندوة ، إن BP تهدف إلى إجراء 100٪ من عمليات التفتيش تحت سطح البحر عن طريق الأنظمة البحرية المستقلة بحلول عام 2025.
كما أصبحت أكثر استقلالية ، بدعم من مراكز العمليات البرية. جربت Equinor بالفعل تجربة عمليات ROV من المراكز البرية (عبر Oceaneering و IKM) ، وقد تم إعدادها هذا العام لتجربة روبوت Eelume الذي يشبه الثعابين تحت سطح البحر في مرآب تحت البحر في حقل Åsgard قبالة النرويج ، على حبل. بحلول عام 2020 ، يأمل ريتشارد ميلز ، مدير المبيعات في Kongsberg Maritime Robotics ، في الندوة. يمكن استخدام الخطوة التالية مع الأوعية السطحية غير المأهولة.
وفي الوقت نفسه ، تساعد تقنيات التصوير ، من الليزر إلى القياس التصويري ، هذه المنصات على جمع المزيد من البيانات ، وبشكل أسرع ، وربما يساعدها أيضًا على التنقل.
 عمليات المسح تحت سطح البحر باستخدام نظام ORUS3D. (المصدر: كومكس الابتكار)
عمليات المسح تحت سطح البحر باستخدام نظام ORUS3D. (المصدر: كومكس الابتكار)
جميلة قابلة للقياس الصور
على الطاير يتم إجراء المسوحات باستخدام photogrammetry. في صيف عام 2018 ، أكملت شركة Comex Innovation مشروعين للتفتيش البحري في بحر الشمال باستخدام تقنية ORUS3D للتصوير الضوئي تحت الماء ، بعد أن أنجزت مشاريع في غرب إفريقيا ، كما قال ريموند روث ، المملكة المتحدة وكيل بحر الشمال لشركة Comex Innovation. دعت كلتا العمليتين ، في المملكة المتحدة والدنماركية في بحر الشمال ، إلى قياس دقة عالية ، واحدة لدعم التعديلات براونفيلد.
يقوم النظام البصري تحت سطح الأرض ORUS3D بقياس ثم إنشاء نماذج ثلاثية الأبعاد عالية الدقة لهياكل تحت سطح البحر. يشتمل كل نظام على حزمة متكاملة من المستشعرات ثلاثية البؤرة ، مع أربع وحدات فلاش LED ذات الحزمة العريضة ، بالإضافة إلى وحدة الحصول على البيانات ومعالجتها. يستخدم تثليث الميزات داخل الصور الملتقطة لتوطين موقعه النسبي وإنشاء إعادة إنشاء سحابة ثلاثية الأبعاد يمكن استخدامها للقياس ، بحيث لا تكون هناك حاجة لنظام ملاحة بالقصور الذاتي أو موضع مستهدف على الكائن للتحجيم عندما يكون في الموقع.
تتوافق الوحدة المدمجة مع ROV للحصول على بيانات الطيران المجانية من أكثر من 40 سم من الهياكل ، على الرغم من أن أفضل مسافة تتراوح بين 1-2 متر من الكائن. وقال روث إن هذا لا يستغرق أكثر من مسح فيديو عام.
يتم تنفيذ المعالجة الأولية على متن الطائرة في الوقت الفعلي لتقييم الموقع والجودة ، قبل معالجة الموقع (في وعاء الدعم) ، لمزيد من التحقق من جودة البيانات وإنشاء نموذج ثلاثي الأبعاد أولي تم قياسه لدقة الطول. بعد ذلك ، تتم المعالجة النهائية للبيانات ، والتي يتم جمعها كبيانات سحابة نقطة ، لإعادة بناء الموقع أو الكائن في نموذج ثلاثي الأبعاد إلى دقة مم.
 نتائج مسح ORUS3D (المصدر: Comex Innovation)
نتائج مسح ORUS3D (المصدر: Comex Innovation)
الحدث الآلي
قال ماثيو برانان ، كبير الباحثين في شركة EIVA ، إن EIVA تعمل على استخدام تقنيات التعلم الآلي ورؤية الكمبيوتر لاكتشاف الكائنات مثل الأنودات على الأنابيب وتلف الأنابيب والنمو البحري تلقائيًا باستخدام كاميرا تقليدية. استخدام التعلم الآلي يعني الاضطرار إلى تدريب نظام يضم عشرات الآلاف من الصور من خطوط الأنابيب. هذا ما قامت به EIVA ، وهو يؤتي ثماره. أجرت الشركة تجارب على مجموعات البيانات الحالية التي تم تنظيمها بالطريقة التقليدية ، لذلك كان من الممكن مقارنة النتائج التلقائية مع الأحداث الاصطناعية. في أواخر عام 2018 ، بدأت أيضًا الاختبارات المباشرة أثناء العمليات المستندة إلى ROV. وقال برانان إن الهدف النهائي من هذه التقنية هو التعرف التلقائي على الأحداث خلال مسح AUV ، مما يمكّن AUV من اكتشاف شيء ما ثم إرسال رسالة إلى سفينة سطحية.
تعمل EIVA أيضًا على أخذ الكاميرات التقليدية إلى أبعد من ذلك ، باستخدام الموقع ورسم الخرائط المتزامنين (SLAM) والتصوير الفوتوغرافي للقيام بمناطق الخريطة ، مع إمكانية تحديد موقع الكاميرا بالنسبة إلى ما يتم تعيينه. أوضح برانان أن أنظمة SLAM الحالية تعتمد على إغلاق الحلقة ، وتحتاج حلول التصوير الفوتوغرافي إلى الكثير من تداخل الصور ووضوح الرؤية ، وعادة لا تكون في الوقت الفعلي. وقال إن البعض يعتمد أيضا على كاميرات ستيريو باهظة الثمن ، والتي تحتاج إلى معايرة وتشغل مساحة.
تقوم EIVA باستدعاء نظام VSLAM الخاص به أو SLAM المرئي. من خلال إنشاء سحابة نقطة متفرقة على الطاير ، يمكن لـ VSLAM تحديد موقعها (أي السيارة التي تعمل عليها) في بيئتها واستخدام النموذج الذي تقوم بإنشائه لتتبع هياكل الغواصة ومسحها تلقائيًا. هذا ممكن مع كاميرا واحدة ، قال برانان ، ومن الصور الثابتة أو الصور المستخرجة من الفيديو ، من خلال تتبع النقاط في كل صورة ، وتقدير المسار ، باستخدام تلك النقاط ، لبناء سحابة نقطة متفرق ، وخلق نموذج التضاريس الرقمية. سوف يعرف AUV أيضًا موقعه الأصلي المطلق ويمكنه بعد ذلك استخدام نقاط الطريق (أي المعالم) على طول الطريق.
يمكن بعد ذلك استخدام سحابة النقطة لإنشاء سحابة ثلاثية الأبعاد كثيفة ثم شبكة ، مع إضافة اللون والملمس. لدى EIVA فريق يعمل على هذا منذ عام 2017 وهو الآن يختبر النظام على AUVs. وقال برانان إنه سيجري هذا العام مشاريع حية ، مع الملاحة البصرية ، وبعد ذلك يريد المساعدة في التفتيش الذاتي والتدخل الخفيف.
subSLAM
لدى Rovco رؤية لنشر AUV مع مركبة سطحية مستقلة (ASV) لإجراء المسوحات ورسم الخرائط باستخدام تقنية SubSLAM Live 3D للصور وتقنية رسم الخرائط. SubSLAM يسمح لـ ROV بإنشاء خريطة ثلاثية الأبعاد لبيئته أثناء التنقل ، دون استخدام أنظمة الملاحة أو القصور الذاتي الأخرى. وتدعو الشركة أنه يعيش رؤية الكمبيوتر 3D.
 مفهوم SubSLAM المباشر من Rovco (المصدر: Rovco)
مفهوم SubSLAM المباشر من Rovco (المصدر: Rovco)
تستخدم تقنية الكاميرا الذكية SubSLAM X1 من Rovco نظام الكاميرا المزدوجة لإنشاء سحابة حية لما تراه. ثم يتم استخدام هذا لحساب موضع السيارة بالنسبة إلى ما تبحث عنه.
وقال جو تيدبال إن روفكو تستخدم SubSLAM على شاشة ROV تحت مراقبة المحيط الأطلسي ، ولكنها تجعلها متوافقة مع منصات أخرى. تخطط الشركة للحصول على أول AUV ، وهو Sabertooth ، من Saab Seaeye ، هذا العام ، ودمج SubSLAM في عام 2020 ، ثم بناء الذكاء الاصطناعي (AI) في النظام في عام 2021. ثم تتطلع إلى تقديم استطلاعات من ASV من 2022.
قال Tidball أن النظام مناسب للقياس تحت سطح البحر ويمكن استخدامه مع مركبة بدون حبل تستخدم الاتصالات الصوتية ، المرتبطة ببوابة الاتصالات السطحية مع شبكات الراديو / الخلوية أو الساتلية ومن ثم إلى السحابة ، حيث يمكن للمهندسين الوصول إلى أداة القياس المستندة إلى المستعرض - يتم تغذية البيانات الحية ثلاثية الأبعاد. مع الذكاء الاصطناعى ، يمكن للسيارة بعد ذلك إجراء التقييمات بنفسها.
اختبرت Rovco نظام SubSLAM في المنجنيق للطاقة المتجددة البحرية في Blyth ، شمال شرق إنجلترا ، في أغسطس عام 2018. وقالت Tidball إن الشركة جربت دقة القياس التي يمكن أن تحققها باستخدام بيانات المسح الأرضي على الهياكل في رصيف جاف ، والذي غمرته المياه حتى يمكن لـ SubSLAM القيام بعملها في 1.2M وضوح. وتمت مقارنة البيانات تحت الماء مقابل مسح ليزر. مقارنةً بالساعتين اللتين تم إجراؤهما لإجراء مسح في الهواء الطلق ، مع وجود خطأ في محاذاة 1.7 مم ، حقق SubSLAM خطأً 0.67 ملم ، من مسح مدته دقيقتان ، حسبما قال Tidball.
وقال Tidball أن النظام يمكن أن يلغي الحاجة إلى أنظمة خط الأساس الطويل (LBL) ، ودقة تحديد المواقع ، لكنه قال إن الرؤية كانت عاملاً ، لكي تعمل الكاميرات. في حين أن التكنولوجيا قادرة على وضع ROV أو AUV داخل بيئتها ، إذا كانت تنتقل إلى موقع آخر ، وكان بلا قيود ، ستكون هناك حاجة إلى التنقل بالقصور الذاتي.
العودة إلى المستقبل
وقال الدكتور مارتن ساير ، المدير الإداري في Tritonia Scientific ومقرها اسكتلندا: "يمكن استخدام التقنيات المستخدمة لإنشاء نقاط سحب على الطاير أيضًا لإنشاء سحب نقاط من الصور أو مقاطع الفيديو الموجودة". على سبيل المثال ، استخدمت Tritonia تقنيتها كجزء من تحليل المنافع البيئية الصافية لغطاء منصة في موقع استوائي ، حيث أراد المشغل تحديد مقدار الزيادة البحرية في الوزن البحري التي ستضيفها إلى الغلاف ، لرفع حسابات التشغيل والتخلص من البر. التخطيط. أعطيت Tritonia لقطات ROV الحالية لتقييمها. لقد تم أخذ ذلك من أجل استقصاءات حياة الأسماك ، وليس السترة الحيوية ، لذلك لم يتم تصميمها أو تصميمها للنمذجة ثلاثية الأبعاد. تم تركيب اثنين من كاميرات HD وكاميرا قياسية على ROV ، اليسار واليمين والوسطى.
بسبب الضوء في الماء ومعظم اللقطات التي يتم توجيهها نحو الأسماك ، فإن حوالي 95٪ منها لم يكن صالحًا للاستخدام. تم إطلاق النار على الباقي ليلًا ، مما يجعله أكثر ملاءمة ، دون أي تداخل في السطح وتناقض أفضل ، مما يسمح بنمذجة قسم كامل شبه كامل من الساق. عن طريق إزالة حجم الساق المعروف من النموذج ، يتم حساب حجم النمو البحري coulld.
على الطاير
بالنسبة للبعض ، تتمثل الإمكانات الحقيقية لكل هذه التقنية في التمكن من معالجة البيانات مباشرة واستخدام تلك المعلومات للتغذية مرة أخرى في الأنظمة المستقلة (وإن كانت خاضعة للإشراف).
هناك حلقة تعليقات من شأنها أن تجعل هذه العمليات أكثر قوة. قال Nazli Deniz Sevinc ، قائد مشروع uROV ، OneSubsea: "معالجة البيانات [التي نجمعها] تلقائيًا هي عندما نحصل على قيمة". "بالإضافة إلى ذلك ، إنها حلقة تغذية مرتدة لخوارزميات الحكم الذاتي الخاضعة للرقابة واكتشاف الميزة" ، مثل Brannan التي تمت مناقشتها.
الكثير يحدث. الهدف هو الحكم الذاتي الخاضع للإشراف ، واكتشاف الأعطال المستقلة ، والعمليات غير المأهولة ، دون الحاجة إلى أوعية الدعم. هناك عقبات ، مثل التشريعات ، والتي في مجال أنظمة السفن بدون طيار وراء التكنولوجيا المتوفرة. هناك مشكلات تتعلق بمعايير البيانات وكيفية التعامل مع كمية البيانات التي يتم إنشاؤها الآن ، وليس أقلها تكييف هذه التقنيات في سير العمل اليوم (أو تكييف سير العمل نفسها). إنها مساحة سريعة الحركة لمشاهدتها بكمية هائلة من الحدود غير الواضحة (إن لم تكن الصور).
تسونامي البيانات
تقنيات التصوير الجديدة تخلق فرصًا جديدة للتصور والاستقلالية تحت سطح البحر. إنهم يخلقون أيضًا تحدي "تسونامي البيانات" للمشغلين. قال بيتر كولينسون ، من شركة BP ، "أحد أكبر المخاوف هو (عندما) عند بدء إرسال أساطيل AUVs إلى هناك ، سنحصل على تسونامي من البيانات التي تأتي إلينا. لقد ركزنا على منصات [الاستشعار / المسح] ، لأننا ما زلنا نبني الثقة في ما هي هذه الأنظمة وما يمكن أن تفعله. قطعة البيانات قادمة ... التعامل مع هذه البيانات في الوقت المناسب. كيف نشكل توأماً رقميًا ونستكشف اكتشاف التغيير الأوتوماتيكي بالتسلسل الزمني؟ "
على الرغم من أن عملية جمع البيانات تتطور بسرعة ، فإن التركيز في المستقبل ينصب على تسليم البيانات للأشخاص الذين يحتاجون إليها ، مثل مهندسي خطوط الأنابيب ، بتنسيق مفيد ومفيد. قال مالكولم جولد ، من الذكاء الاصطناعي ، إن الذكاء الاصطناعي (AI) سيساعد ، من خلال استخدام الحوسبة السحابية والكشف التلقائي عن الحالات الشاذة أو العيوب. لكنه قال إن الأمر سيستغرق بعض الوقت لتطوير النظم. يعمل Fugro على ذلك وقد أجرى تجارب في بيرث ، والتي ساعدت في إثارة مشاكل مع الذكاء الاصطناعى ، مثل التمييز بين طلاء خط أنابيب فضي من سمك القرش. تشمل الخطوات المستقبلية بناء الاستقلال الذاتي في منظمة العفو الدولية. ولكن ، اقترح جولد أن نماذج جديدة ينبغي أن ينظر إليها أيضا. وتساءل: هل يمكن بناء خطوط أنابيب بأجهزة استشعار ، مما يجعلها "ذكية" من البداية مع توقع جميع عمليات الصيانة. "في المستقبل ، لن يكون الأمر متعلقًا بالمعدات التي تستخدمها للحصول على تلك البيانات ، ولكن حول ما تحصل عليه من هذه البيانات."
في الواقع ، في المستقبل ، لن ننظر حتى في هذه البيانات ، كما اقترح جو تيدبال ، كبير الباحثين في روفكو. الذكاء الاصطناعي ، الروبوتات ، سيقوم بالتفسير وصنع القرار. "لا أعتقد أنه بعد 10 سنوات سننظر إلى الفيديو بعد الآن. سنحصل ببساطة على تقارير عبر البريد الإلكتروني من الروبوتات في بحر الشمال تقول إنك بحاجة إلى إلقاء نظرة على XYZ. "
التفتيش السريع للأنابيب
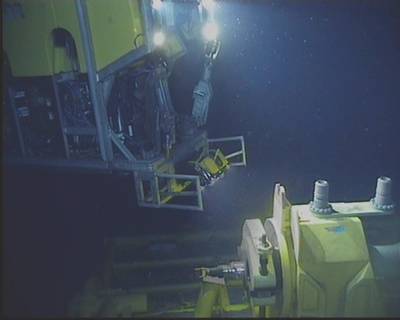
بالنسبة لمسوحات خطوط الأنابيب ، تركز شركة BP على القيام بالأمور بشكل أسرع. في عام 2017 ، تعاقدت BP مع DeepOcean ، باستخدام "Fast ROV" (في الصورة أعلاه ، Superior ROV من Kyst Design في النرويج) لمسح 478 كم من خط الأنابيب (الخريطة أدناه) ، بين مرافق Clair و Magnus في بحر الشمال إلى Sullom Voe Terminal ، على الشاطئ شتلاند ، ومن مرافق برنت والنينيان إلى ماغنوس ، كل ذلك في أقل من أربعة أيام بقليل. وقال كولينسون إن المسح شمل الليزر ، وكاميرات اللقطات عالية الدقة ، وأنظمة مسح الكاثود (CP) لحماية التدرج الميداني (FIGS) ، ومتوسط وقت الفحص 5.1KT / ساعة ، وأسرع 6 مرات من ROV القياسية و 5 X أسرع من ROV القياسية . كما تضمنت المسح الجانبي وبيانات المسح متعدد الحزم. وكانت النتيجة النهائية ملف طبقة مشهد ثلاثي الأبعاد ، وقوائم فسيفسائية ثنائية الأبعاد وقوائم حدث / شاذ.
 A Kyst design Superior ROV يتم نشره من أجل مسح خطوط أنابيب BP بواسطة DeepOcean (المصدر: BP)
A Kyst design Superior ROV يتم نشره من أجل مسح خطوط أنابيب BP بواسطة DeepOcean (المصدر: BP)
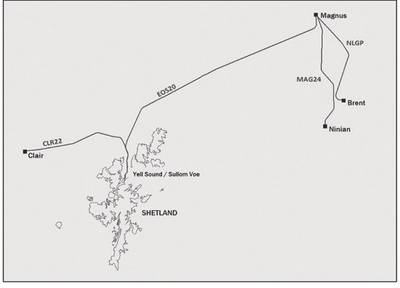 نظام خطوط الأنابيب الذي تم مسحه على مدار أربعة أيام (المصدر: BP)
نظام خطوط الأنابيب الذي تم مسحه على مدار أربعة أيام (المصدر: BP)
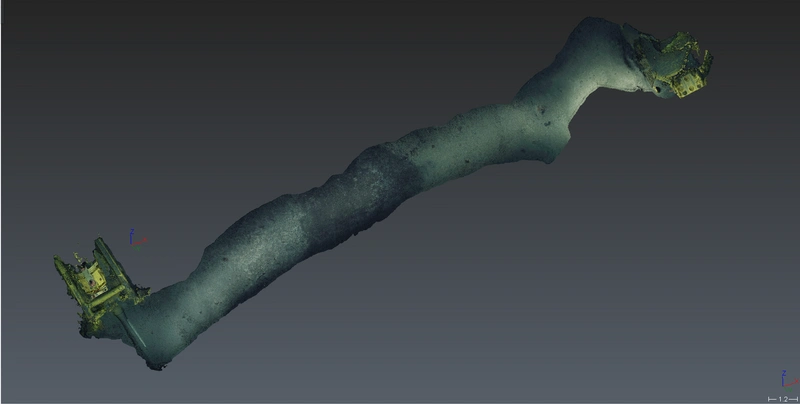
 قسم من خط أنابيب تم تصويره على المسح (المصدر: BP)
قسم من خط أنابيب تم تصويره على المسح (المصدر: BP)
تمتد الصوتيات
تعمل شركة شلمبرجير OneSubsea على مشروع يسمى uROV. هدفها هو مركبة غير مقيدة تحت سطح البحر ، تتمتع بالحكم الذاتي الخاضع للإشراف ، مما يعني القدرة على التواصل عبر الفيديو مع السيارة من الشاطئ. لكن في الوقت الذي تفتح فيه شبكات الجيل الرابع الخلوية المتوفرة في الخارج اتصالات فيديو عبر الهواء ، من خلال روابط الفيديو المائية ليست بهذه السهولة ، أخبر نازلي دينيز سيفينك ، أحد رواد مشروع uROV ، جمعية OnSubsea للتكنولوجيا ، جمعية البحرية الدولية رابطة المقاولين (IMCA) والجمعية الهيدروغرافية في اسكتلندا (THSiS) ندوة مشتركة في أكتوبر.
يخطط برنامج uSV من OneSubsea لاستخدام سيارة Saab Seaeye Sabertooth ، المركبة بتقنيات شلمبرجير. وقال سيفينك إن رؤية uROV تقع في مكان ما بين AUV و ROV يتم تشغيلها يدويًا ، مما يوفر استقلالًا غير مقيد ولكن خاضع للإشراف. قد يتضمن ذلك وجود "إنسان في الحلقة" ، بينما يعمل على مسافات تصل إلى 3 كم من بوابة الاتصالات السطحية ، على سبيل المثال. سطح غير مأهول. عندما تكون البنية التحتية القريبة من البحر ، سيكون لها أيضًا رابط بيانات يصل إلى 200 متر عبر المياه.
وهذا من شأنه تمكين الوصول إلى المركبات تحت البحر 24/7. ولكن ، هذا يعني الحاجة إلى خدمة الواي فاي تحت سطح البحر والاستشعار المتقدم والاستشعار المرئي والتحكم المتقدم والتحليلات التلقائية. قال سيفينس إن uROV سوف تستخدم EIVA Navisuite ، لتخطيط المهمة ، وطبقة مستقلة تم تطويرها لصالح Sabertooth. ولكن ، هذا يعتمد على ردود الفعل في الوقت الحقيقي ، والتي تعتمد على الاتصالات.
فيما يتعلق بعمليات براونفيلد ، تستهدف uROV الاتصالات الصوتية ، مما يعني بطبيعتها معدل بيانات منخفض. تعمل OneSubsea ، عبر قاعدة مالكها في شلمبرجير في بوسطن ، على تحديد مقدار البيانات التي يمكنها ضغطها عبر 100 كيلوبت في الثانية. في عام 2017 ، قالت Sevinc أن الشركة حققت نقل فيديو من قارب إلى قارب عبر قناة صوتية بسرعة 100 كيلو بت في الثانية على بعد كيلومتر واحد. ثم حقق نتائج مماثلة مع نقل عمودي. قال Sevinc إن هذا هو الحد الأعلى للفيديو ، مع استخدام النطاق الترددي المتبقي للأوامر. خلال عام 2018 ، تم دمج هذه القدرة في uROV ، مع خطط لتطوير القدرة على نقل بيانات الفيديو من خلال 3 كيلومترات من هذا العام وعمليات النشر الفعلية بحلول نهاية العام. تشتمل المجموعة الأخرى التي يتم دمجها على uROV على تقنية الليزر LiDAR (الكشف عن الضوء والمدى) من 3D في Depth.
شركة بيكر هيوز تفوز بعقد توسعة محطة سابين باس للغاز الطبيعي المسال التابعة لشركة شينير
-172102 "(حقوق الصورة: شينير)")
شركتا بلو إنيرجيز وتوتال إنيرجيز تُسرّعان عمليات الاستكشاف قبالة سواحل ليبيريا

الجزء العلوي من منصة هوجين بي في طريقه إلى مشروع تطوير بحر الشمال
-171989 "(حقوق الصورة: Aker BP)")
شركة فاتنفال تقوم بتركيب أول دعامة أحادية في أكبر مزرعة رياح بحرية في ألمانيا
-171929 "تركيب Nordlicht Monopil (الائتمان: DEME)")

-171805 "(حقوق الصورة: فارد)")




-171635 "(حقوق الصورة: كونراد)")

-171544 "(مصدر الصورة: PRIO)")