الإقامة في الانتظار
")
لطالما كانت رؤية وجود مركبات تحت الماء قادرة على دعم عمليات الغواصة دون الاعتماد على سفينة سطحية. نحن أقرب إلى هذه الرؤية من أي وقت مضى ، ولكن ما الجديد الذي لم يكن موجودًا من قبل لتحقيق ذلك؟
في وقت سابق من هذا العام تم التوصل إلى شيء من المعالم في المركبات تحت الماء في مجال النفط والغاز. مركبة محمولة تحت الماء (AUV) مثبتة لاسلكيًا وشحنها وتنزيلها ، وكلها تحريضية ، مع التحكم الآلي عن بعد والتحكم البصري المباشر أثناء مظاهرة في بحيرة في السويد. كان الرصيف هو محطة الإرساء القياسية المفتوحة تحت سطح البحر في إيكينور (SDS) وكانت المركبة عبارة عن Sabertooth لساب سي.
إنها خطوة نحو امتلاك المركبات بشكل دائم في البحر وتحتضن المزيد من هذه المظاهرات بينما يضع آخرون مركباتهم الجديدة تحت الاختبار. ولكن ، سيقول البعض أننا كنا هنا من قبل ؛ وقد حاول هذا في 1990s. إذا ما الجديد؟ إنه مزيج من القوى - مدفوعة بالسوق ومدفوعة بالتكنولوجيا.
بالنسبة إلى Gro Stakkestad ، مدير التدخل تحت سطح البحر وإصلاح خطوط الأنابيب ، في Equinor ، فهو مزيج من الركود الاقتصادي ، ومحرك للأتمتة وزيادة الوعي البيئي. يقول ستيفان ليندو ، مدير التكنولوجيا الناشئة في أوروبا في شركة Oceaneering ، إن الاتصالات البحرية كانت المكون الرئيسي المفقود ، فضلاً عن التقدم في تقنيات البطاريات والملاحة ، بينما شون هالبين ، مدير إدارة المنتجات والتسويق ، لدى الوافد الجديد هيوستن ميكاترونكس ، يقول تخفيض التكلفة والوصول إلى قوة الحوسبة محركات كبيرة. التحركات نحو جميع البنية التحتية للحقل الكهربائي ستساعد أيضًا.
القطعة النهائية
بالنسبة إلى Jan Siesjö ، كبير مهندسي Saab Seaeye ، فإن الجمع بين الإرساء والشحن وتحميل البيانات كان الجزء الأخير في اللغز لجلب هذه القدرة إلى الميدان. ولكن ، كان هناك الكثير من الأعمال الأخرى في الخلفية ، إلى حد كبير حول قدرات التحكم عن بعد.
"قد يبدو التحكم عن بُعد لمسافات طويلة أمرًا بسيطًا ، ولكن لجعله يعتمد عليه ، فأنت بحاجة إلى الكثير من الأشياء. إن الأمر لا يقتصر على إرسال الأوامر عبر الإنترنت ، بل يحتوي على أنظمة يمكن أن تحافظ على أمانها ، ويمكن الحفاظ عليها حتى لا تسوء ، وإذا حدث خطأ ما ، فهذا ليس بالأمر المعقد ، فأنت بحاجة إلى مهندس جامعي لإصلاحه ". يشمل حفظ المحطة ، والتنقل بنقطة الطريق وتجنب العوائق.
على جانب الاتصالات ، كان صعب سيي يعمل مع شركة بوينغ ، التي تدير فئة عمل من طراز Leopard light يتم تشغيلها عن بعد تحت الماء (ROV) عبر وصلة عبر الأقمار الصناعية في جميع أنحاء الولايات المتحدة ، وتقوم بعمل مناور ، وموصلات تزاوج ، ومهام طيران ، ومراقبة نقطة الطريق ، إلخ. " يقول Siesjö: لقد كانت لدينا بعض القيود الصارمة ، فقط 1 ميجابايت في الثانية ، والكمون الذي دفعنا إلى ثلاث ثوان وتسببنا في تعمد جودة البيانات. على الرغم من ذلك ، تمكنا من تزاوج موصلات الرصاص المتطايرة وفعل الكثير من الأشياء الأخرى. الهدف الأطول أجلاً هو إخراج ROV من AUV الضخمة والقيام بعمل التدخل بطرق مختلفة. "
 صعب Seaeye في Sabertooth التي أظهرت الشحن الاستقرائي وتنزيل البيانات في السويد في وقت سابق من هذا العام. (الصورة: صعب سيي)
صعب Seaeye في Sabertooth التي أظهرت الشحن الاستقرائي وتنزيل البيانات في السويد في وقت سابق من هذا العام. (الصورة: صعب سيي)
العمل بعمق هو تحدٍ آخر - الوصول إلى الموقع ثم الحفاظ على روابط الاتصالات. في وقت سابق من هذا العام ، جربت Saab Seaeye هذا السيناريو ، حيث أجرت اختبارات لمدة ثلاثة أسابيع على عمق 2400 متر من المياه في البحر المتوسط - مربوط ومستقل - مع تواصل ناجح بنسبة 100 ٪ مع السيارة وموقعها ، حتى عند الدفع الكامل لما يصل إلى 4 عقدة ، وفقًا لما يقوله Siesjö. شمل العمل في هذه الأعماق تحديد كيفية السفر إلى موقع العمل بكفاءة - طوله 2400 متر بعيدًا - مع الحفاظ على تحديد المواقع ، وذلك باستخدام مزيج من نظام الملاحة بالقصور الذاتي (INS) وتحديد المواقع الأساسية فائقة الخط (USBL).
تدعم Saab Seaeye عملها مع أجهزة محاكاة عالية الدقة (مثل تلك المستخدمة في اختبار طائرات الشركة الأم المقاتلة) ، بحيث يمكنها تشغيل جميع أنظمة التحكم المستقلة والإنسانية في الحلقة مع برنامج التحكم الأصلي الخاص بها ومعرفة ما إذا كانت تعمل - قبل وقت طويل من ذهابهم إلى الماء.
بالإضافة إلى ذلك ، تعمل على كيفية إنشاء المركبات ، في الوقت الفعلي ، لخرائط ثلاثية الأبعاد للبيئة التي تستخدمها باستخدام نظام كاميرا استريو للقيام بترجمة وتعيين ثلاثي الأبعاد في وقت واحد (SLAM). سيتيح ذلك للسيارة التنقل وقياس ما تراه بالنسبة إلى نفسها. يختبر Saab Seaeye هذه القدرة منذ عام 2018 ، حيث قام ببناء سحب ثلاثية الأبعاد للعالم تحت الماء.
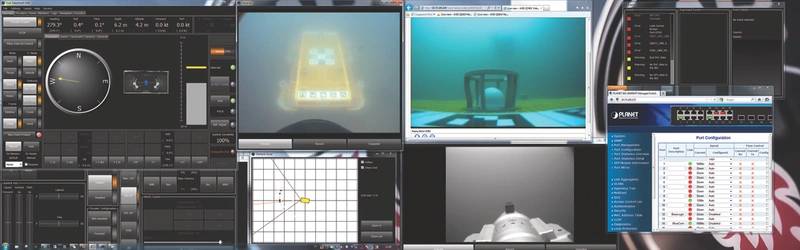 من خلال استخدام أدوات التحكم عن بُعد المتقدمة ، تم عرض الإرساء ، مع تغذية فيديو حية إلى الشاطئ. (الصورة: صعب سيي)
من خلال استخدام أدوات التحكم عن بُعد المتقدمة ، تم عرض الإرساء ، مع تغذية فيديو حية إلى الشاطئ. (الصورة: صعب سيي)
Geosub إلى AIV
شركة أخرى كانت تبني هذه القدرة لبعض الوقت هي Subsea 7. في التسعينات ، كانت وراء Geosub ، وهي تقنية مرخصة من Subsea 7 من المركز الوطني لعلوم المحيطات (NOC). كان هدفها الرئيسي هو فحص خط الأنابيب بشكل مستقل ، وذلك باستخدام ميزة التنقل والإيقاف التلقائي في إحداثيات الطريق لزيادة بيانات مسح قاع البحر التي تجمع جودة وكفاءة وتقليل دعم الأوعية السطحية. على الرغم من نجاحها من حيث جودة البيانات ، إلا أنه كان لا يزال من الضروري إطلاقها واستردادها من سفينة وتحتاج إلى دعم سطحي لتحديد المواقع. كما لم تستطع إجراء قياسات الحماية الكاثودية ، لذلك كانت محدودة.
انتقلت شركة Subsea 7 ، من خلال أعمال i-Tech 7 الخاصة بها ، وأصبحت الآن لديها أداة الفحص المستقلة (AIV) ، والتي تتمثل في القدرة على إعادة تحديد موقعها ، والتي تم تطويرها بموجب سلائفها ، Prototype AIV ، بحيث لا تحتاج إلى وضع منتظم تحديثات من سفينة السطح. "لقد تم تطوير هذا القرار بقرار الانتقال إلى المركبات التي تحوم بشكل مستقل ، مع التركيز على القدرة على التفتيش على البنية التحتية تحت سطح البحر. نظرًا لأن الغرض كان يركز الآن على فحص المعدات الموجودة ، يمكن تتبع الجهاز نفسه لتوفير المواضع عالية الدقة اللازمة للتنقل دون تحديثات من سفينة السطح. "إنه يشبه التكسير التلقائي ، ولكن في 3D ويمكن وصفه بأنه شكل من أشكال ضربة عنيفة.
لدى AIV أيضًا نظام لرسو السفن تحت سطح البحر ، والذي يقطع عمليات الإطلاق والاستعادة عن السفن. يقول جاميسون: "إن إدخال تخطيط مبسط للمهمة ، مرتبط بإعادة التنقل المدعوم بالطاقة وعملية حيث يمكن للـ AIV الالتحام الذاتي بالسلة ، أدى بشكل فعال إلى كسر رابط اعتماد السفينة".
 يتم إجراء العمليات عن بعد أيضًا مع ROVs. هذا هو مركز التحكم البري i-Tech 7 لعمليات ROV. (الصورة: i-Tech 7)
يتم إجراء العمليات عن بعد أيضًا مع ROVs. هذا هو مركز التحكم البري i-Tech 7 لعمليات ROV. (الصورة: i-Tech 7)
الالتحام الموحد
جاءت دفعة كبيرة في هذا المجال من أمثال Equinor التي دفعت رؤية "طائرات بدون طيار تدخل تحت الماء" (UID) ، كما يطلق عليها ، ومنح العقود ، بما في ذلك لتصميم SDS قياسي مفتوح يمكن لأي مركبة استخدامه . يتضمن تصميم SDS الموصلات الاستقرائية من علامات Blue Logic و WiSub و AruCo و ChaRuCo ، والتي ترى كاميرا الطائرة بدون طيار موضعها النسبي. تقوم شركة Water Linked للاتصالات الصوتية ومقرها تروندهايم أيضًا بتزويد أجهزة المودم الصوتية الصغيرة لتحديد موقع السيارة على المحطة. يمكن لـ SDS أيضًا استيعاب أجهزة استشعار أخرى ، مثل مودم SonCardine's BlueComm البصري للمساحة الخالية لتغذية الفيديو المباشر أو تنزيل بيانات النطاق الترددي العالي. هناك أيضًا واجهات قياسية ، يتم تطويرها من خلال مجموعة SWiG (Subsea Wireless Interface Group) و Deepstar ، للميكانيكيين.
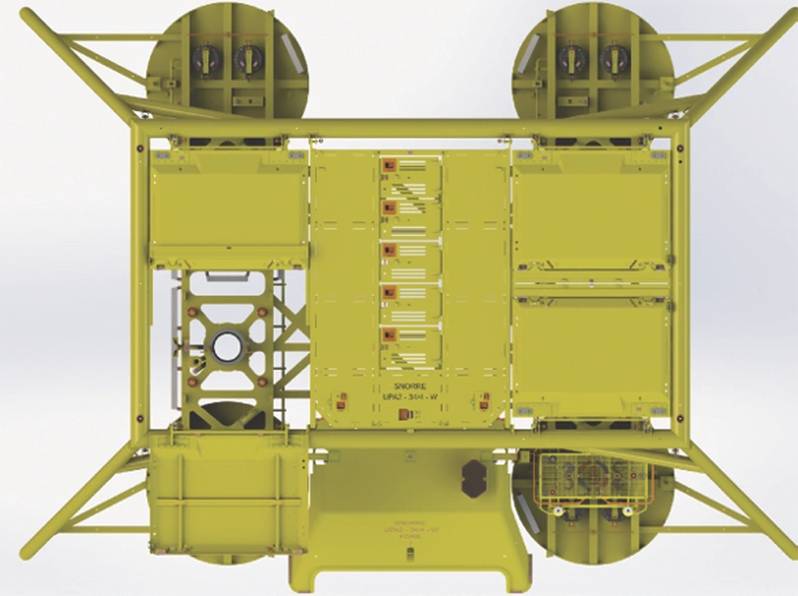 تصميم محطة الإرساء المغمورة تحت سطح البحر في Equinor ، يظهر شقًا في مشعب ، مثل منصة مروحية صغيرة. (الصورة: المنطق الأزرق)
تصميم محطة الإرساء المغمورة تحت سطح البحر في Equinor ، يظهر شقًا في مشعب ، مثل منصة مروحية صغيرة. (الصورة: المنطق الأزرق)
تم نشر SDS ، التي بناها Blue Logic في النرويج ، في رصيف في تروندهايم وأيضاً على بعد 2.2 كيلومتر من الشاطئ في محطة تروندهايم البيولوجية على عمق 350 متر من المياه. آخر هو الذهاب إلى حقل Åsgard حيث Eelume "الروبوت ثعبان" سوف تعمل على حبل الألياف البصرية والكابلات المتصلة في وحدة إنتاج Åsgard A العائمة. تشمل الخطوات التالية تطبيقًا أوسع على نطاق واسع في مشروع Snorre Expansion ، حيث يمكن استخدام سبعة SDS (مدمجة في المشعب أو قائمة بذاتها مع أغطية حماية من الألياف الزجاجية) على بعد 15 كيلومترًا وتوصيلها بالطاقة والاتصالات في تخطيط الحقل.
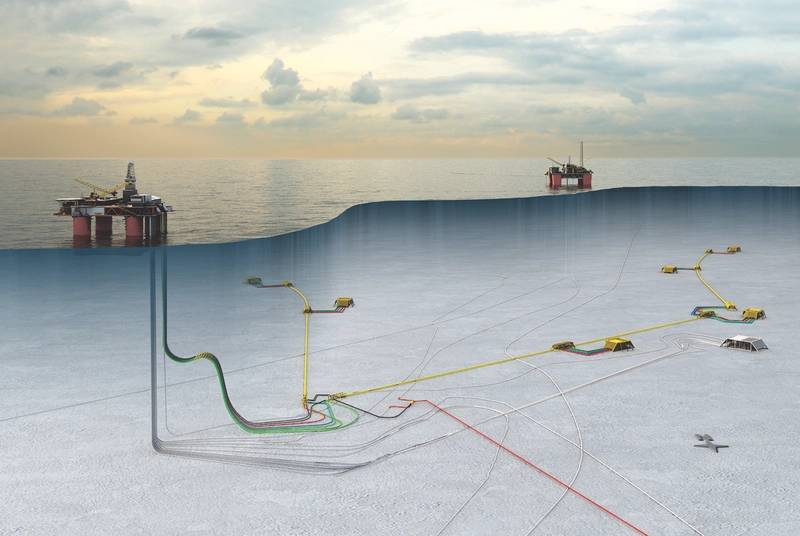 تخطيط حقل Snorre Expansion Project ، والذي يمكن دعمه قريبًا بواسطة طائرات بدون طيار تحت الماء. (الصورة: Equinor)
تخطيط حقل Snorre Expansion Project ، والذي يمكن دعمه قريبًا بواسطة طائرات بدون طيار تحت الماء. (الصورة: Equinor)
تطوير نماذج جديدة
يقول جاميسون إن هذه التطورات ، تؤثر الآن على الطريقة التي يتم بها التخطيط لتطوير مشاريع جديدة. في الواقع ، حققت i-Tech 7 في خدمات IRM على مستوى الميدان لـ Equinor باستخدام UID في مشروع توسيع Snorre (SEP) وحقل Snorre A (SNA) في البحر النرويجي ، وكذلك في الحقول الأخرى.
قيمت الدراسة إمكانية إدخال مركبات هجينة تحت سطح البحر عن طريق تحديد أي ثغرات تقنية من شأنها أن تمنع نشر UID على المدى الطويل في قاع البحر. قامت أيضًا بتقييم الخيارات الموصى بها لتكوينات محطة الإرساء لدعم السيارة من خلال تقديم نظرة عامة على التكوينات والخصائص المطلوبة. نظرًا لأن الطاقة وشبكة البيانات الموثوق بها جزء لا يتجزأ من نجاحها ، قامت الشركة بفحص الأحكام التشغيلية والإدارية لدعم نشاط المركبة الهجينة تحت سطح البحر. كان الهدف النهائي للمشروع هو التوصية بخطة تطوير لتمكين الطائرات بدون طيار من "العيش" بحلول أواخر عام 2020.
يقول جاميسون: "إن المركبات المستضافة في قاع البحر والتي تدعمها محطات الإرساء في قاع البحر ، والتي تستخدم في عمليات التفتيش المستقلة والمرتبطة بغرف التحكم البرية ، للإنسان الذي يتحكم في الحلقة في مهام التدخل ، يدفع المتطلبات مرة أخرى بطريقة إيجابية". "سيُطلب من المركبات أن تكون مقيمًا تحت سطح البحر لعدة أشهر في كل مرة ، دون صيانة أو استرداد للإصلاح. يمكّن هذا الشريط العالي في الموثوقية والتحكم أيضًا عمليات ROV التقليدية ، من خلال التحكم عن بعد في المركبات من مراكز التحكم البرية وكهربة المركبات لزيادة الموثوقية والكفاءة. "ويضيف كل هذا إلى عدد أقل من أيام السفن والناس في الخارج.
هناك إمكانية لجعل أنظمة البحر أسهل. يمكن أن تكون المحركات ، بخلاف الأنظمة الحرجة للسلامة ، يدوية ، بدلاً من الهيدروليكية أو الكهربائية ، مما يقلل من الأنظمة الهيدروليكية والكهربائية التي تحتاج إلى التثبيت تحت سطح البحر - وهذا يعني أقل كبل.
يقول Helge Sverre Eide ، مدير الأعمال في Blue Logic ، إنه لكي يتم إطلاق الطائرات بدون طيار تحت سطح البحر ، فإن نظام البحار وفلسفات التشغيل بحاجة إلى التغيير. "لكي يكون هذا اقتصاديًا ، تحتاج إلى زيادة نطاق عمل الطائرات بدون طيار" ، كما يقول. "أنت بحاجة إلى أدوات جديدة وتحتاج إلى ضبط أو تغيير نظام الإنتاج تحت سطح البحر. تحتاج إلى تغيير جانبي المعادلة. يجب أن تكون الأدوات الجديدة خفيفة الوزن حتى تتمكن الطائرة بدون طيار من تحليقها. يجب أن تتغير الصيانة تحت سطح البحر إلى وجود قطع أصغر لتغييرها. عقلية مختلفة - إذا توقف شيء ما ، يمكنك فقط تغييره - أصبحت ممكنة الآن. هذه فلسفة جديدة ".
 (الصورة: سايبم) (الصورة: سايبم) |
في إيطاليا ، كانت Saipem مشغولة باستخدام Hydrone R ، التي بدأت تجربة لمدة ستة أشهر في "حديقة اللعب" تحت الماء بالقرب من ميناء Trieste ، شمال شرق إيطاليا. تم الإعلان مؤخرًا عن أن السيارة ستنشرها شركة Equinor Offshore Norway في النرويج عام 2020. ومنحت Equinor نيابة عن ترخيص Njord ، Saipem عقد خدمة تحت البحر لمدة 43.7 مليون دولار لمدة 10 سنوات لاستخدام التكنولوجيا التي تبدأ عندما يستأنف حقل Njord الإنتاج . يوصف Hydrone R بأنه ROV هجيني مزود بقدرات AUV ، على سبيل المثال سيكون له مناور ، من أجل عمل التدخل ، ويمكن أن يعمل على حبل طوله 300 متر ، للتحكم الكامل في عرض النطاق الترددي الفعلي ، ولكنه يمكن أيضًا أن يسافر مسافات بين البحر الحقول ، غير المربوطة مثل AUV ، مع الاتصالات الصوتية تصل إلى 4 كيلومترات. بمجرد الوصول إلى موقع العمل ، يمكن أن يتحول إلى الاتصالات البصرية ذات النطاق الترددي العالي للعمليات الخاضعة للإشراف. يمكن أن تنتشر Hydrone إما من مرآب لقاع البحر أو من نظام سطح منتشر على أساس المهمة. يقول ستيفانو ماجيو ، المدير الفني في سايبيم ، إنه يمكن تشغيله لمدة تتراوح بين 3000 و 10 ساعات دون وجود حبل ، وعلى بعد 10 كيلومترات. يقول ماجيو إن النشر من مضيف سطحي قد يكون أسهل لأنك لا تحتاج إلى بنية تحتية تحت سطح البحر. "قد تكون حساسًا لظروف الطقس للنشر ، لكن لديك القدرة على الصيانة بسهولة." ولكن هذا يعني أنه لا يمكنك الحفاظ عليها بانتظام ، لذلك يلزم توفير أعلى درجة من الموثوقية. " |
مكتب إدارة الطاقة في المحيطات يقترح بيع عقد إيجار BBG3، وهو ثالث عقد إيجار في خليج أمريكا

شركة دولفين دريلينج تُبرم اتفاقية تسويق مع شركة فانترس إنك لمنصة بلاكفورد دولفين شبه الغاطسة
")
شركة مبادلة تستعين بشركة سفن صغيرة (SLB) لخدمات الحفر في المياه العميقة قبالة سواحل إندونيسيا
-168002 "(حقوق الصورة: SLB)")
اندماج ترانس أوشن وفالاريس لإنشاء شركة حفر بحرية كبرى بقيمة 17 مليار دولار تضم 73 منصة حفر
")
بدء المرحلة الثانية من مشروع إيني للغاز الطبيعي المسال في الكونغو بتصدير أول شحنة من الغاز الطبيعي المسال (فيديو)
-167856 "(حقوق الصورة: إيني)")
بئر استكشافية في منطقة بحرية قبالة سواحل البحر الأسود تفشل في تحقيق نتائج.

-167727 "سفينة الحفر غلوبتروتر 1 (حقوق الصورة: شركة نوبل)")
أول توربين يرتفع شامخاً في مزرعة رياح بحرية تابعة لشركة دومينيون إنرجي بقدرة 2.6 جيجاواط في الولايات المتحدة
-167623 "(حقوق الصورة: دومينيون إنرجي)")
شركة إكوينور تمدد إقامة سفينة الحفر التابعة لشركة سي دريل قبالة سواحل البرازيل

حقل سيمي التابع لشركة أكراكي يستعد لبدء الإنتاج في أوائل فبراير مع انتهاء عمليات الحفر
-167415 "ستيلا إنرجي 1 MOPU (حقوق الصورة: درايدوكس وورلد)")
شركة سي دريل تعزز حجم أعمال الحفر البحري من خلال منح عقود متعددة المناطق

-167309 "سفينة الحفر ويست كابيلا (حقوق الصورة: سي دريل)")
برافا إنيرجيا تشتري حصة بتروناس في أصول حوض كامبوس مقابل 450 مليون دولار
-167178 "(حقوق الصورة: برافا إنيرجيا)")
أطلقت شركة أولستين فيرفت أولى سفينتين جديدتين من طراز CSOV لصالح شركة جي بي مورغان.
-166941 "(حقوق الصورة: أولستين فيرفت)")